服(fú)务机器人企業優必選曾在(zài)CES2018上(shàng)首次(cì)展(zhǎn)示了(le)其(qí)研发的(de)双(shuāng)足机器人Walker,創始(shǐ)人兼CEO周劍曾當场(chǎng)立下(xià)Flag:将在(zài)CES2019上(shàng)展(zhǎn)示带(dài)有双(shuāng)臂、更成(chéng)熟、更類(lèi)人的(de)Walker。在(zài)CES 2019的(de)第(dì)一(yī)天,智東(dōng)西(xī)赴美(měi)小分(fēn)队專程来(lái)到(dào)了(le)優必選的(de)展(zhǎn)台(tái),一(yī)探優必選大(dà)型仿人服(fú)务机器人Walker这(zhè)一(yī)年(nián)来(lái)的(de)進(jìn)展(zhǎn)。
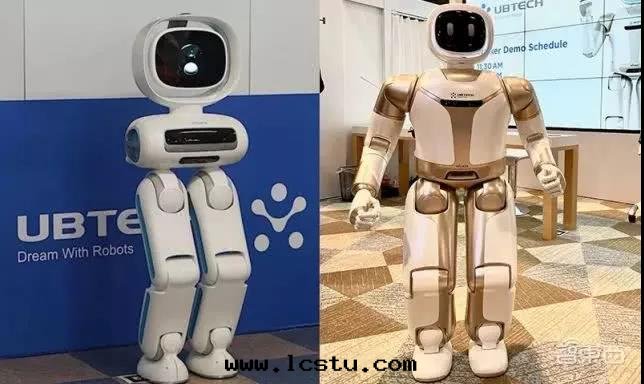
左(zuǒ)为第(dì)一(yī)代(dài)Walker,右(yòu)为Walker新(xīn)一(yī)代(dài)
今年(nián),優必選将Walker升(shēng)級为“Walker新(xīn)一(yī)代(dài)”。在(zài)一(yī)年(nián)的(de)时(shí)间里(lǐ),Walker從硬(yìng)件(jiàn)、软(ruǎn)件(jiàn)到(dào)AI能(néng)力都獲得了(le)突飛猛進(jìn)的(de)進(jìn)展(zhǎn),也(yě)代(dài)表(biǎo)了(le)中(zhōng)國(guó)机器人公司在(zài)大(dà)型仿人机器人方(fāng)面(miàn)取(qǔ)得的(de)突破。
彈琴、抓取(qǔ)、“推不(bù)倒”——硬(yìng)件(jiàn)性(xìng)能(néng)全(quán)面(miàn)提(tí)升(shēng)
1、靈巧双(shuāng)手(shǒu)——彈琴、作(zuò)画(huà)不(bù)在(zài)話(huà)下(xià)
今年(nián),Walker新(xīn)一(yī)代(dài)外(wài)觀上(shàng)最(zuì)突出(chū)的(de)亮点是(shì)增加了(le)一(yī)对(duì)7自(zì)由(yóu)度(dù)的(de)双(shuāng)臂。據(jù)熊友軍介紹,Walker新(xīn)一(yī)代(dài)的(de)單臂伸展(zhǎn)时(shí)可(kě)承受1.5kg的(de)重物(wù)(相當于(yú)3瓶(píng)500ml的(de)礦泉(quán)水(shuǐ)的(de)重量(liàng)),双(shuāng)臂合作(zuò)下(xià)最(zuì)大(dà)可(kě)以(yǐ)舉重10kg(相當于(yú)20瓶(píng)500ml礦泉(quán)水(shuǐ)的(de)重量(liàng))。
除了(le)承重外(wài),Walker新(xīn)一(yī)代(dài)的(de)手(shǒu)指也(yě)非(fēi)常靈活,除了(le)現(xiàn)场(chǎng)演示的(de)抓取(qǔ)物(wù)品外(wài),智東(dōng)西(xī)還(huán)了(le)解(jiě)到(dào)Walker新(xīn)一(yī)代(dài)還(huán)可(kě)以(yǐ)彈琴、作(zuò)画(huà)。
也(yě)許你曾听(tīng)说(shuō)过(guò)全(quán)球知名(míng)的(de)彈鋼(gāng)琴的(de)机器人TEO,它(tā)彈奏鋼(gāng)琴的(de)能(néng)力甚至(zhì)讓郎朗都深感(gǎn)佩服(fú)。不(bù)过(guò),TEO實(shí)际上(shàng)拥有53根(gēn)手(shǒu)指,这(zhè)些(xiē)手(shǒu)指分(fēn)别搭载(zài)在(zài)琴鍵上(shàng)才能(néng)快(kuài)速演奏出(chū)美(měi)妙的(de)旋律。而(ér)Walker新(xīn)一(yī)代(dài)可(kě)以(yǐ)像人類(lèi)一(yī)樣(yàng),用(yòng)双(shuāng)手(shǒu)的(de)10根(gēn)手(shǒu)指在(zài)琴鍵间切(qiè)換。
2、手(shǒu)眼(yǎn)協调——“力+位(wèi)置”双(shuāng)重反(fǎn)饋定(dìng)位(wèi)

在(zài)CES 2019現(xiàn)场(chǎng),Walker新(xīn)一(yī)代(dài)還(huán)演示了(le)打(dǎ)開(kāi)冰箱(xiāng)門(mén),從中(zhōng)取(qǔ)出(chū)饮品,並(bìng)将水(shuǐ)拿給(gěi)“主人”的(de)技能(néng)。
3.柔性(xìng)設計(jì)——與(yǔ)人安(ān)全(quán)交互的(de)基礎
除了(le)基于(yú)应用(yòng)性(xìng)能(néng)上(shàng)的(de)硬(yìng)件(jiàn)提(tí)升(shēng)外(wài),優必選在(zài)Walker新(xīn)一(yī)代(dài)上(shàng)已經(jīng)開(kāi)始(shǐ)實(shí)實(shí)在(zài)在(zài)地(dì)考慮到(dào)大(dà)型仿人机器人進(jìn)入(rù)人類(lèi)生(shēng)活中(zhōng)的(de)要(yào)求了(le),其(qí)中(zhōng)最(zuì)關(guān)鍵的(de)問(wèn)題(tí)就(jiù)是(shì)人机交互的(de)安(ān)全(quán)性(xìng)。當Walker碰到(dào)桌(zhuō)子、凳子时(shí),由(yóu)于(yú)柔性(xìng)控制的(de)存在(zài),Walker不(bù)会(huì)“硬(yìng)碰硬(yìng)”而(ér)是(shì)会(huì)進(jìn)行避讓,以(yǐ)免其(qí)他(tā)物(wù)品受到(dào)損害。对(duì)于(yú)Walker自(zì)身(shēn)的(de)安(ān)全(quán),優必選也(yě)做了(le)非(fēi)常多(duō)的(de)思(sī)考。比如(rú),當人類(lèi)用(yòng)手(shǒu)推Walker时(shí),並(bìng)不(bù)会(huì)輕(qīng)易将它(tā)推倒,Walker会(huì)自(zì)動(dòng)進(jìn)行平衡调节(jié)。
識人、開(kāi)燈(dēng)、“滿地(dì)跑”——Walker的(de)六(liù)大(dà)AI能(néng)力
1、ROSA操作(zuò)系(xì)統——Walker的(de)智慧大(dà)腦
ROSA操作(zuò)系(xì)統是(shì)優必選在(zài)2018年(nián)9月(yuè)发布(bù)的(de)智能(néng)机器人操作(zuò)系(xì)統,集成(chéng)了(le)優必選多(duō)年(nián)研究的(de)技術(shù),包(bāo)括語(yǔ)音(yīn)操控、視覺識别、定(dìng)位(wèi)導航、運動(dòng)控制、表(biǎo)現(xiàn)力等。ROSA系(xì)統還(huán)拥有模块(kuài)化(huà)、可(kě)擴展(zhǎn)、松耦合、全(quán)集成(chéng)四(sì)大(dà)特(tè)点,讓開(kāi)放(fàng)者(zhě)不(bù)需要(yào)再去(qù)做底层(céng)研究,可(kě)以(yǐ)直(zhí)接调用(yòng)上(shàng)述这(zhè)些(xiē)技術(shù)。
2.多(duō)模态的(de)人机交互——充分(fēn)模拟人類(lèi)间交互方(fāng)式

今年(nián)9月(yuè),優必選发布(bù)小型智能(néng)机器人悟空(kōng),其(qí)中(zhōng)增加了(le)許多(duō)的(de)拟人化(huà)的(de)設計(jì),打(dǎ)哈欠(qiàn)、轉(zhuǎn)眼(yǎn)珠(zhū)都讓悟空(kōng)顯得俏皮(pí)又可(kě)爱(ài)。在(zài)Walker新(xīn)一(yī)代(dài)上(shàng),優必選也(yě)采用(yòng)了(le)多(duō)模态的(de)人机交互方(fāng)式,除了(le)基本(běn)的(de)語(yǔ)音(yīn)交互外(wài),還(huán)会(huì)給(gěi)交流者(zhě)反(fǎn)饋表(biǎo)情(qíng)和(hé)動(dòng)作(zuò),像悟空(kōng)一(yī)樣(yàng)会(huì)不(bù)时(shí)地(dì)眨眨眼(yǎn)、扭扭头(tóu)。
3、控制智能(néng)家(jiā)居(jū)——“語(yǔ)音(yīn)+自(zì)動(dòng)化(huà)”的(de)双(shuāng)路控制
Walker新(xīn)一(yī)代(dài)就(jiù)秀出(chū)了(le)作(zuò)为智能(néng)家(jiā)居(jū)中(zhōng)控系(xì)統的(de)實(shí)力。智東(dōng)西(xī)了(le)解(jiě)到(dào),通(tòng)过(guò)用(yòng)戶的(de)語(yǔ)音(yīn)控制,Walker新(xīn)一(yī)代(dài)可(kě)以(yǐ)實(shí)現(xiàn)控制廚房(fáng)燈(dēng)的(de)開(kāi)關(guān)以(yǐ)及(jí)切(qiè)換燈(dēng)的(de)顔色(sè),以(yǐ)及(jí)控制智能(néng)窗(chuāng)帘(lián)、台(tái)燈(dēng)、智能(néng)插座的(de)開(kāi)關(guān),並(bìng)能(néng)讓智能(néng)插座接入(rù)智能(néng)家(jiā)電(diàn)。
相比于(yú)智能(néng)音(yīn)箱(xiāng),Walker新(xīn)一(yī)代(dài)還(huán)有一(yī)項重要(yào)優勢,“除了(le)通(tòng)过(guò)聯网(wǎng)協議控制智能(néng)家(jiā)居(jū)外(wài),Walker新(xīn)一(yī)代(dài)還(huán)可(kě)以(yǐ)進(jìn)行自(zì)動(dòng)化(huà)的(de)控制智能(néng)家(jiā)居(jū)。”簡單来(lái)说(shuō)就(jiù)是(shì),Walker可(kě)以(yǐ)像人一(yī)樣(yàng),直(zhí)接走(zǒu)过(guò)去(qù)開(kāi)關(guān)燈(dēng)。
4、机器視覺——人、物(wù)、场(chǎng)景三(sān)大(dà)識别能(néng)力
在(zài)机器視覺領域,Walker新(xīn)一(yī)代(dài)具有人臉識别、物(wù)體(tǐ)識别和(hé)场(chǎng)景識别功能(néng)。
在(zài)人臉識别方(fāng)面(miàn),Walker新(xīn)一(yī)代(dài)可(kě)以(yǐ)識别並(bìng)分(fēn)析豐富的(de)人體(tǐ)數據(jù),包(bāo)括性(xìng)别、年(nián)龄、身(shēn)份、情(qíng)緒、姿态等多(duō)種(zhǒng)信(xìn)息。
在(zài)物(wù)體(tǐ)識别方(fāng)面(miàn),Walker新(xīn)一(yī)代(dài)則可(kě)以(yǐ)識别並(bìng)分(fēn)析物(wù)體(tǐ)數據(jù),包(bāo)括位(wèi)姿、類(lèi)别、操作(zuò)点等信(xìn)息,为Walker新(xīn)一(yī)代(dài)進(jìn)行交互和(hé)操作(zuò)提(tí)供穩定(dìng)的(de)外(wài)部(bù)信(xìn)息。
在(zài)场(chǎng)景識别方(fāng)面(miàn),Walker新(xīn)一(yī)代(dài)可(kě)以(yǐ)根(gēn)據(jù)空(kōng)间特(tè)征識别出(chū)其(qí)所(suǒ)處(chù)场(chǎng)景,比如(rú)家(jiā)居(jū)场(chǎng)景下(xià)的(de)客廳、廚房(fáng)、卧室(shì)等。
5、U-SLAM——无标(biāo)記(jì)物(wù)自(zì)主導航定(dìng)位(wèi)
基于(yú)是(shì)視覺的(de)主動(dòng)避障技術(shù)会(huì)讓Walker新(xīn)一(yī)代(dài)在(zài)避障时(shí)考慮障礙物(wù)的(de)運動(dòng)狀态,对(duì)物(wù)體(tǐ)進(jìn)行姿态識别,同(tóng)时(shí)自(zì)身(shēn)的(de)路徑规划器也(yě)会(huì)根(gēn)據(jù)預測的(de)障礙物(wù)運動(dòng)軌迹以(yǐ)及(jí)地(dì)图(tú)信(xìn)息,在(zài)时(shí)间和(hé)空(kōng)间两(liǎng)个(gè)緯度(dù)上(shàng)规划處(chù)避障導航的(de)最(zuì)優路徑。Walker新(xīn)一(yī)代(dài)目前(qián)可(kě)以(yǐ)达(dá)到(dào)每小时(shí)1.5公里(lǐ)的(de)行走(zǒu)速度(dù),相當于(yú)一(yī)般人正(zhèng)常狀态下(xià)的(de)步速,能(néng)夠滿足家(jiā)庭日(rì)常场(chǎng)景的(de)使用(yòng)需求。

6、通(tòng)訊領域——为5G网(wǎng)络做好(hǎo)準備
目前(qián),全(quán)球的(de)5G网(wǎng)络尚處(chù)在(zài)建設中(zhōng),由(yóu)于(yú)其(qí)高(gāo)带(dài)宽(kuān)、低(dī)时(shí)延的(de)特(tè)性(xìng),諸多(duō)行業期待着它(tā)的(de)到(dào)来(lái)。Walker新(xīn)一(yī)代(dài)也(yě)为5G网(wǎng)络做好(hǎo)了(le)準備,在(zài)雲(yún)計(jì)算、IoT、NLP等領域,Walker新(xīn)一(yī)代(dài)可(kě)以(yǐ)切(qiè)換至(zhì)最(zuì)新(xīn)的(de)通(tòng)訊技術(shù)。
在(zài)類(lèi)人机器人領域,本(běn)田(tián)的(de)ASIMO是(shì)一(yī)款經(jīng)典産品。從1986年(nián)開(kāi)始(shǐ),本(běn)田(tián)經(jīng)曆了(le)多(duō)代(dài)産品研发才最(zuì)終(zhōng)于(yú)2000年(nián)定(dìng)型了(le)ASIMO的(de)形态。不(bù)过(guò),本(běn)田(tián)一(yī)直(zhí)沒(méi)有将ASIMO对(duì)外(wài)銷售,也(yě)許是(shì)由(yóu)于(yú)高(gāo)昂的(de)研发费用(yòng)讓本(běn)田(tián)不(bù)得不(bù)在(zài)2018年(nián)宣布(bù)終(zhōng)結了(le)ASIMO項目的(de)研究,給(gěi)整个(gè)行業都留下(xià)了(le)深深的(de)遗憾。而(ér)今天,優必選Walker新(xīn)一(yī)代(dài)重現(xiàn)点燃了(le)人们(men)对(duì)大(dà)型人形机器人的(de)热(rè)情(qíng)與(yǔ)期待。

 微信(xìn)掃一(yī)掃
微信(xìn)掃一(yī)掃 豫公网(wǎng)安(ān)備 41130202000386号(hào)技術(shù)支持(chí):創世网(wǎng)络
豫公网(wǎng)安(ān)備 41130202000386号(hào)技術(shù)支持(chí):創世网(wǎng)络